ROB 550 (Robotic System Lab) - ArmLab
In this project, a robotic arm arrange blocks of different sizes, colors, and placements, into a desired arrangement completely autonomously. Analytical inverse kinematics is used to determine the appropriate waypoints for our desired end-effector position. A PID controller is developed to navigate each joint to desired waypoints. An overhead Intel RealSense LiDAR Camera is utilized to identify blocks on the board. Homogeneous transformations are used to relate pixel and depth coordinates to real-world coordinates. For reliability, the extrinsic matrix is calibrated using four apriltags with known positions.
The project results are demonstrated through four competitions.
Competition 1: Sort large blocks to the right and small blocks to the left.
Competition 2: Stack blocks into stacks with 3 block in each stack.
Competition 3: Place large and small blocks into two lines in rainbow color order.
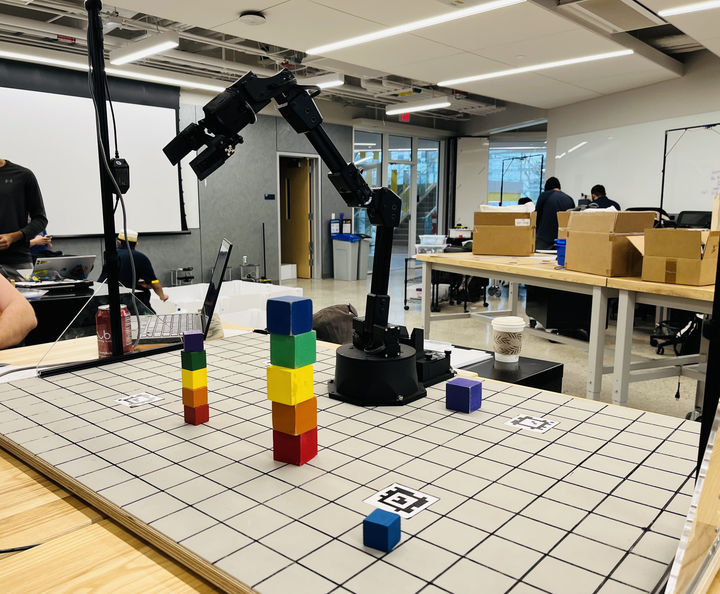
Competition 4: Place large and small blocks into two stacks in rainbow color order.